その6:理論派アニメーターのための走り屋講座
自動車の動きをつけるとき、何も考えないで素直に作ってみると何か違和感があったりしませんか?
よくあると思われるのが全コーナーで不自然にテールスライドしてたり。
そんな時、ホントに基礎的な理論だけでも知っておくとそれを目安に動きをつけられるので便利です。
ということで、今回は自動車の旋回のお話です。
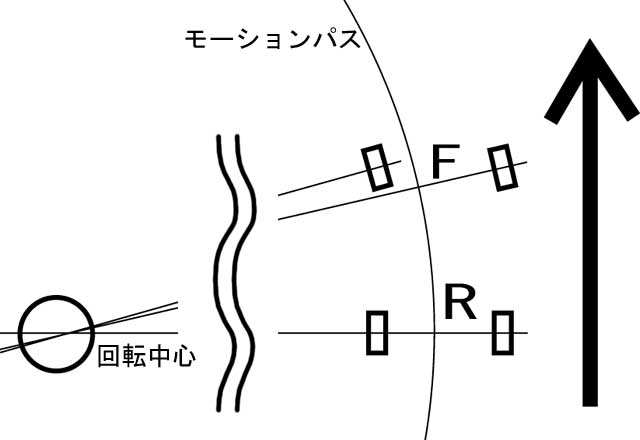
上図は、一般的な前輪操舵の自動車が4輪ともスリップ率ゼロで左に定常円旋回をしている図です。
自動車のハンドルを回すと車の回転中心が無限遠から近づいてきて旋回が始まります。
その際、回転中心は前輪車軸と後輪車軸を延長した線が交わる点に定まり、
その点を中心として定常円旋回することになります。
つまり、ハンドルを切るというのは車の回転中心の位置を定めることに他なりません。
これを3Dアニメーション(モーションパス優先)で再現するには車の回転中心を後輪車軸上に定め、
後輪車軸がモーションパスに直交するように車を回転させればよいことになります。
前輪の舵角は上図の通り左右で多少異なりますが、モーションパスに平行にしておけば左右が同じ舵角でもバレないでしょう。
意識して車の向きをモーションパスの向きからずらせばアンダーステアもオーバーステアも思いのままです。
また、車の特性としてオーバーステア気味の車なら回転中心を前に寄せればリアタイヤは
常に一定量スライドするようになりますし、後ろに寄せれば常にアンダーを出して走る運転になります。
あとは好みや見せ方によってアレンジしてみましょう。
被牽引車がある場合(トラクター&トレーラーのような)は牽引車が前輪、被牽引車が後輪に当たります。
この場合、
トレーラー(被牽引車)
∟トラクター(牽引車)
∟前輪
のようにペアレントしてトレーラーの動きをつけて向きをモーションパスにあわせます。
そのあとトラクターの向きをトラクターのモーションパスにあわせて
前輪を操舵すれば(パッと見)自然な内輪差を出すことができます。